Research Projects
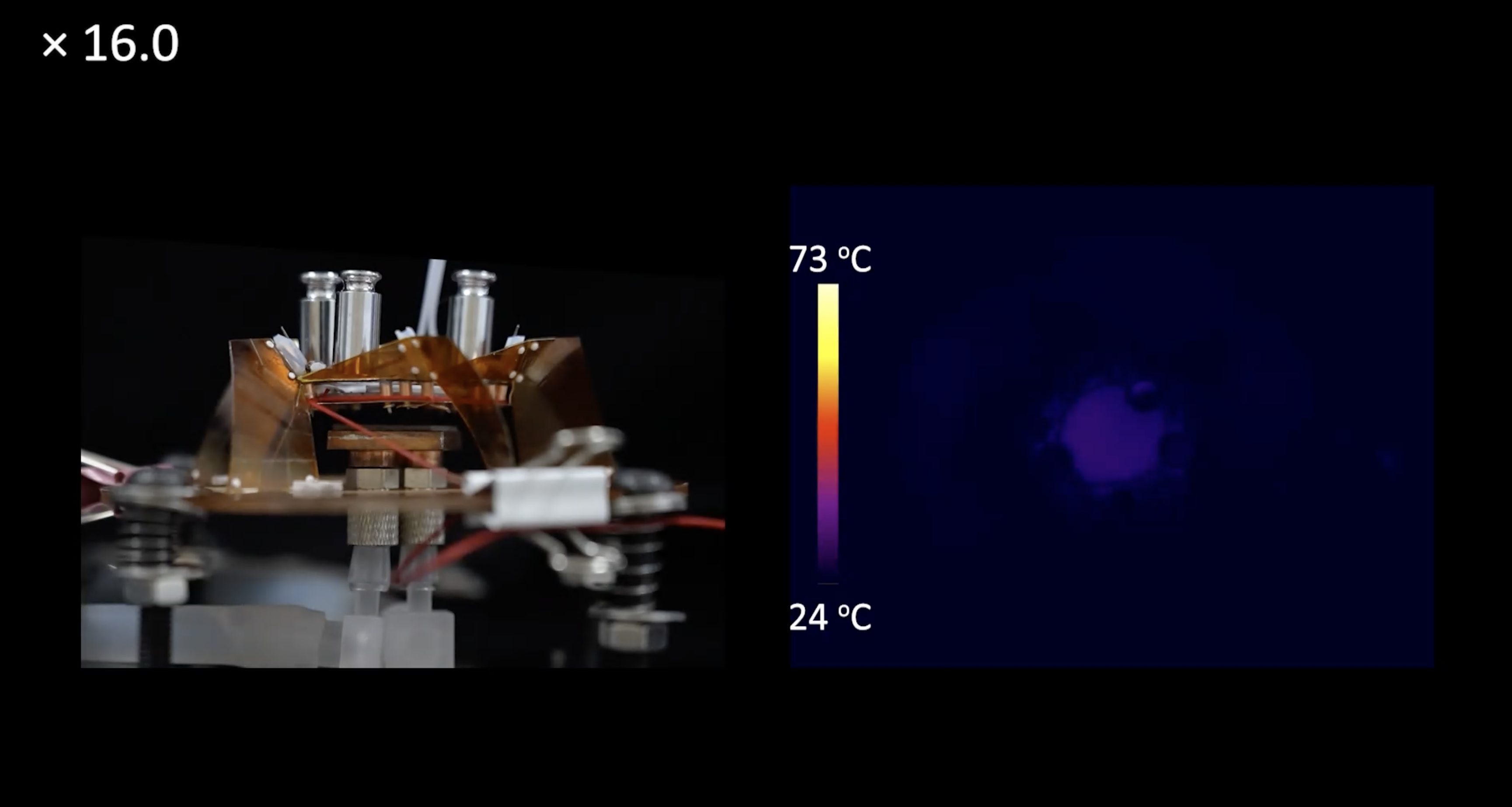
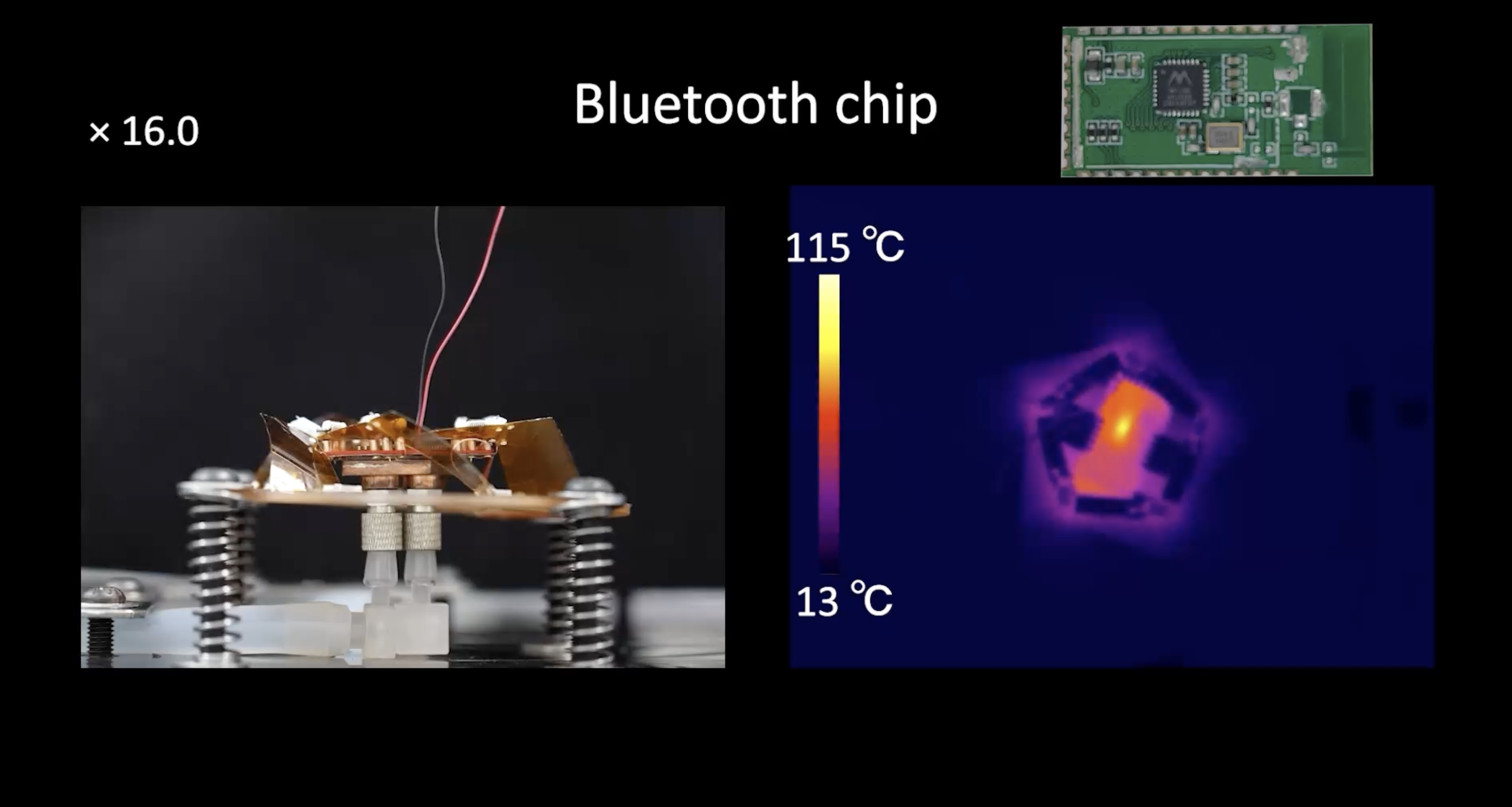
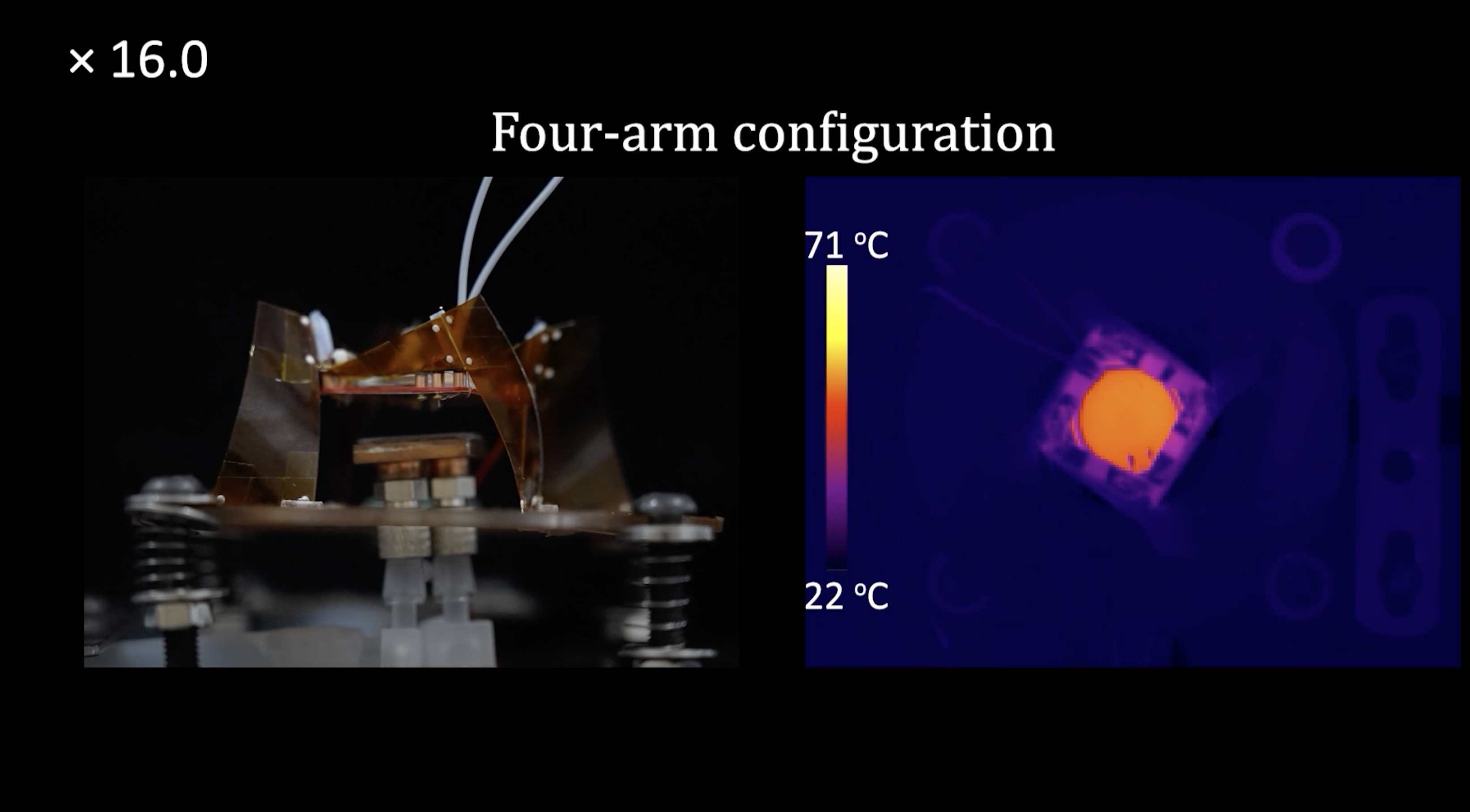
Bistable Origami Thermal Switch with High Switching Ratios
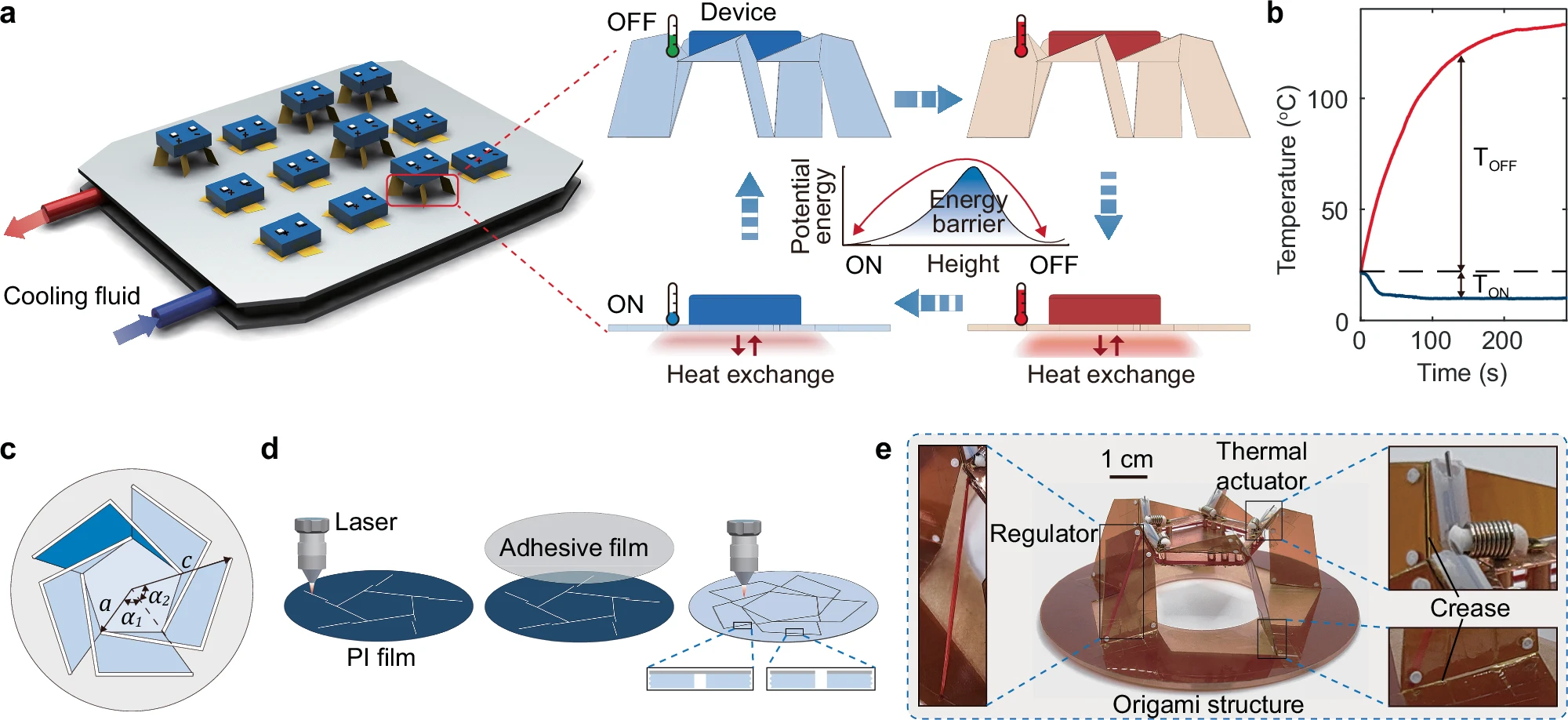
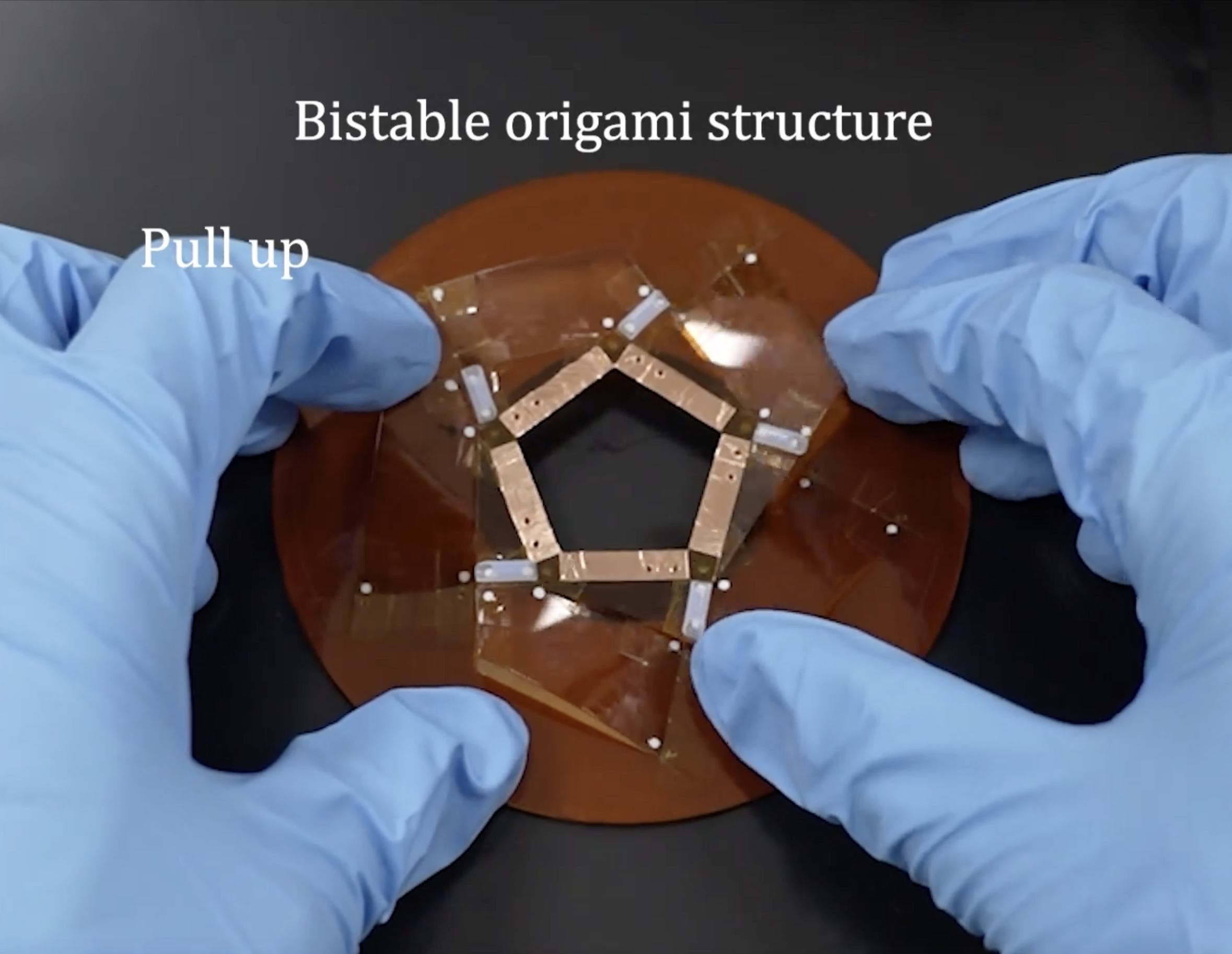
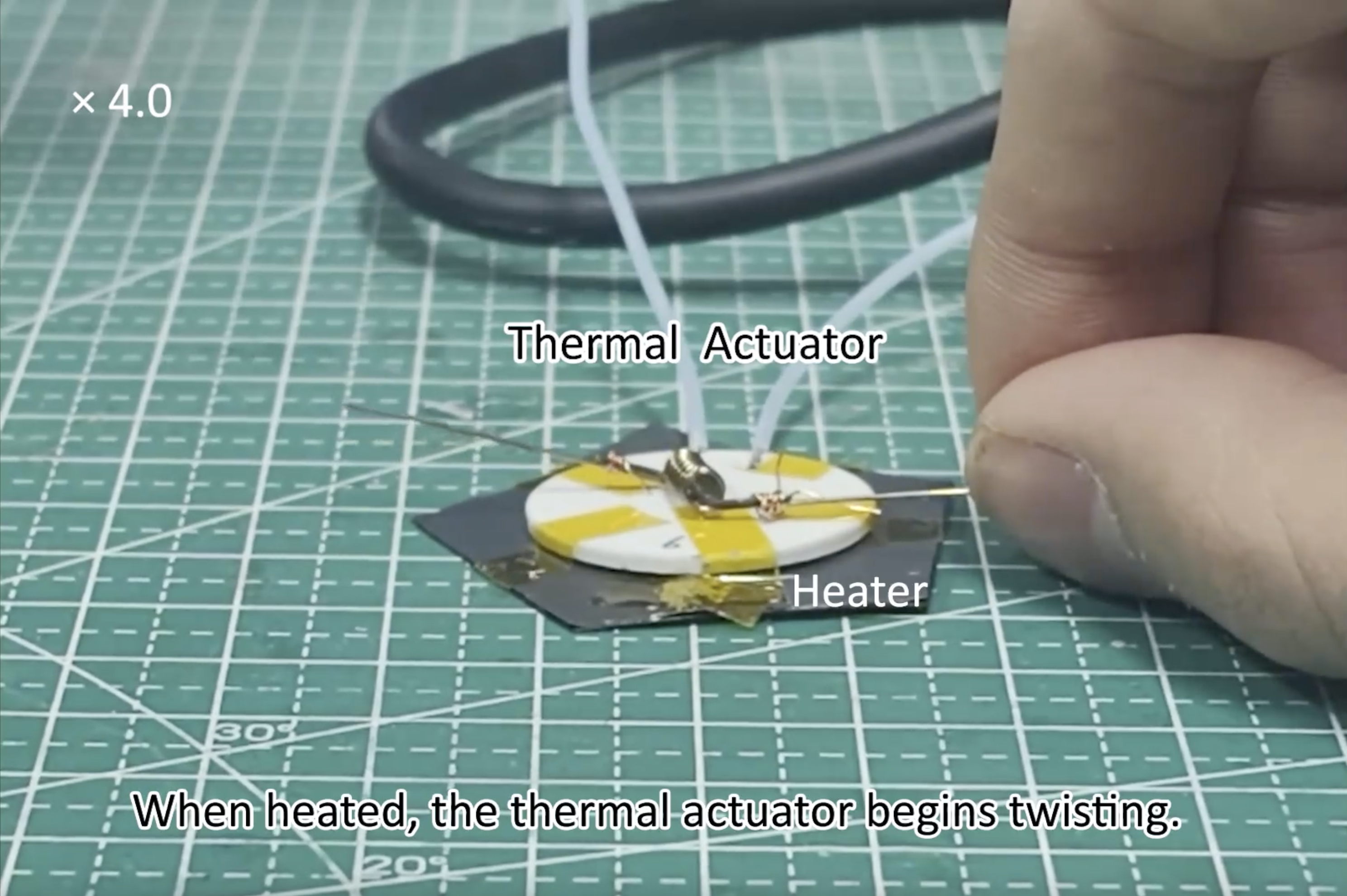
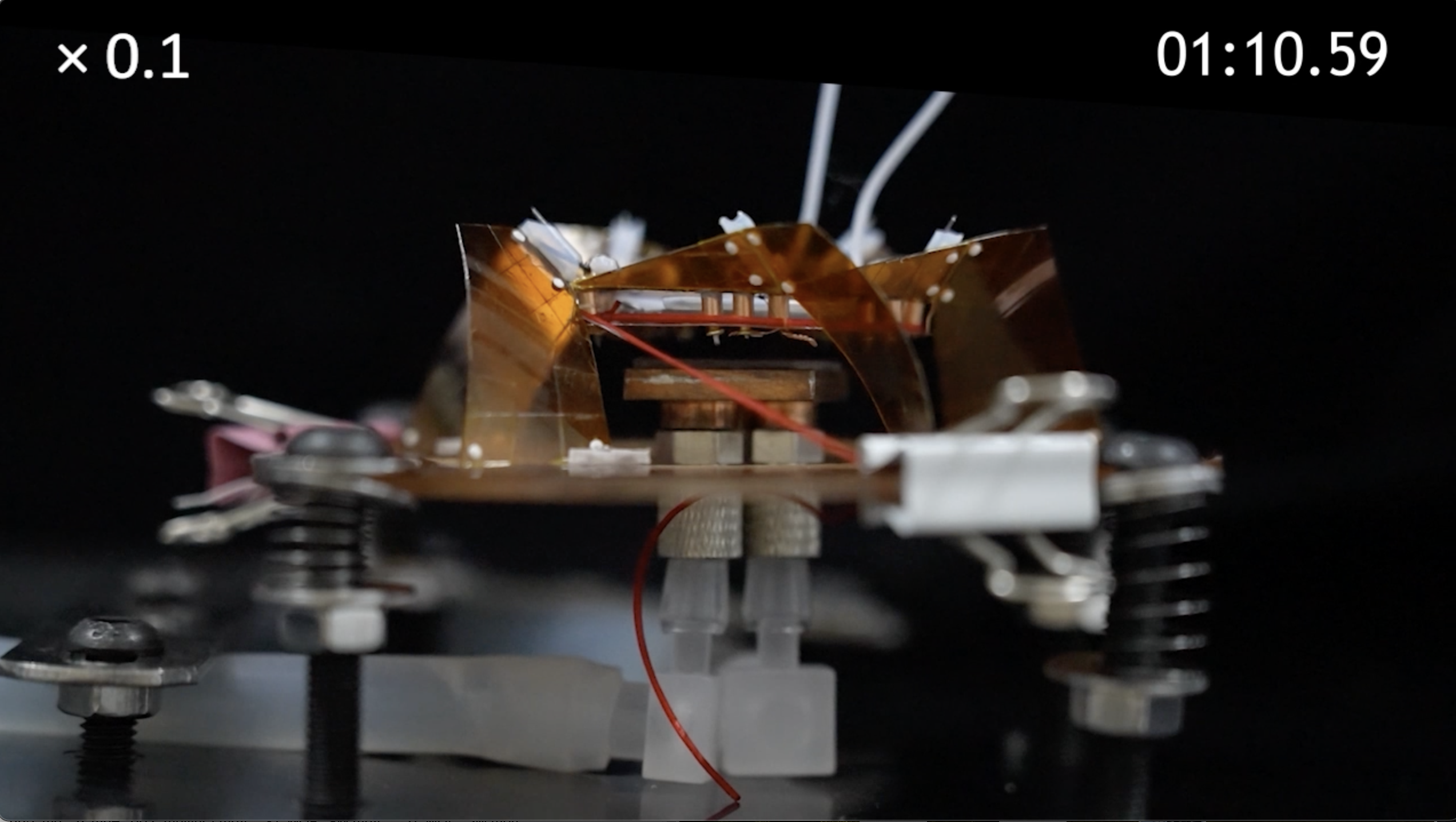
Effective thermal management is critical for power electronics in AI and robotics, highlighting the need for dynamic, reversible thermal switches. Achieving a high switching ratio remains challenging. Here, we present a bistable origami-inspired thermal switch that switch rapidly between distinct thermal conduction states without external energy or sensory input. Fabricated from a thin film through precise cut-and-fold, it achieves thermal switching ratios of 13,984 in vacuum and 1360 in ambient air, significantly higher than existing approaches. Switching is driven by snap-through instability, actuated by a combination of shape-memory alloy and elastic springs. The energy landscape can be tuned through geometric variations to adjust triggering temperature and switching ratio. We demonstrate stable, repeatable thermal regulation across multiple scenarios, offering a pathway toward passive, programmable thermal management.
The work was published in Nature Communications on February 25, 2026.
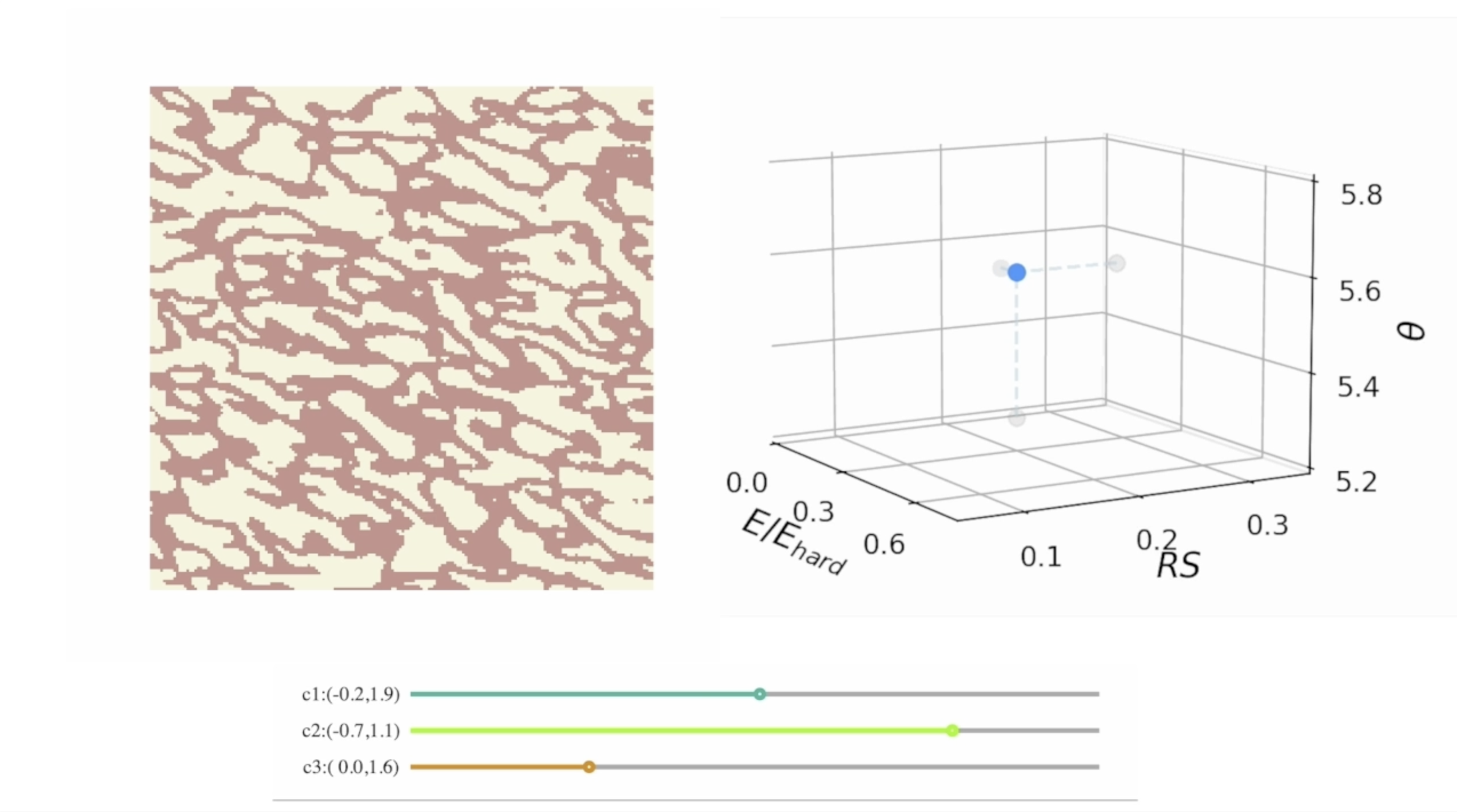
Self-supervised AI for decoding and designing disordered metamaterials
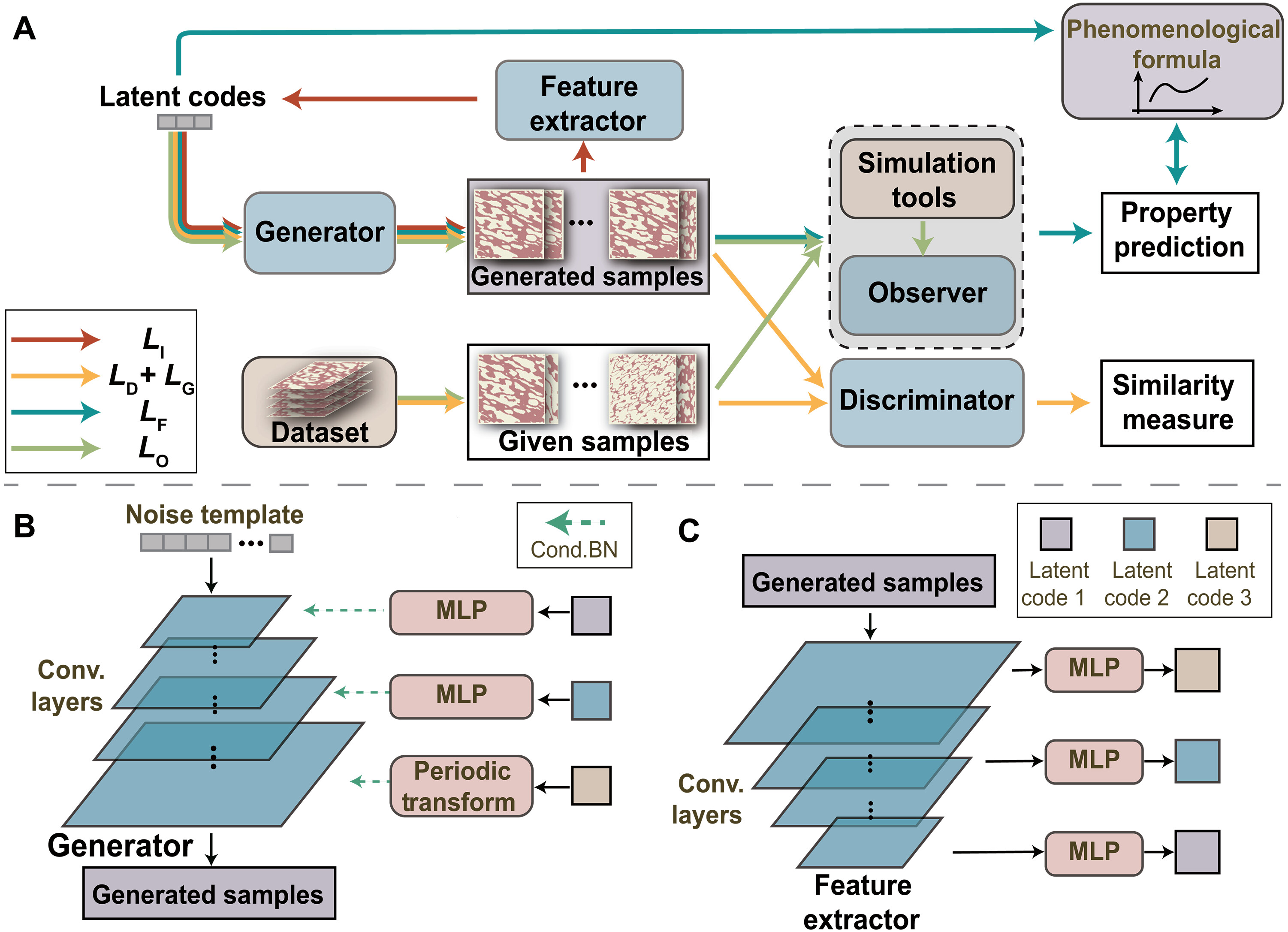
Disordered microstructures are key to the distinct multifunctional properties of many natural materials. However, understanding the relationship between their microstructures and physical functions remains formidable. Here, we introduce a physics-guided, self-supervised artificial intelligence (AI) framework called generative networks for disordered metamaterials (GNDM). We integrate a formula writing module in the training process of neural networks to enforce the identification of the most selective set of hidden geometric invariants that dictate bulk properties. By inversely solving the formulae, GNDM manipulate disordered geometric features to extrapolate property space and design previously unknown structures via its generator module, validated by experiments. GNDM offers an all-in-one AI framework that closes the loop of feature extraction, property prediction, formula writing, and inverse design, unraveling the regulative role of disorder.
The work was published in Science Advances on January 2, 2026.

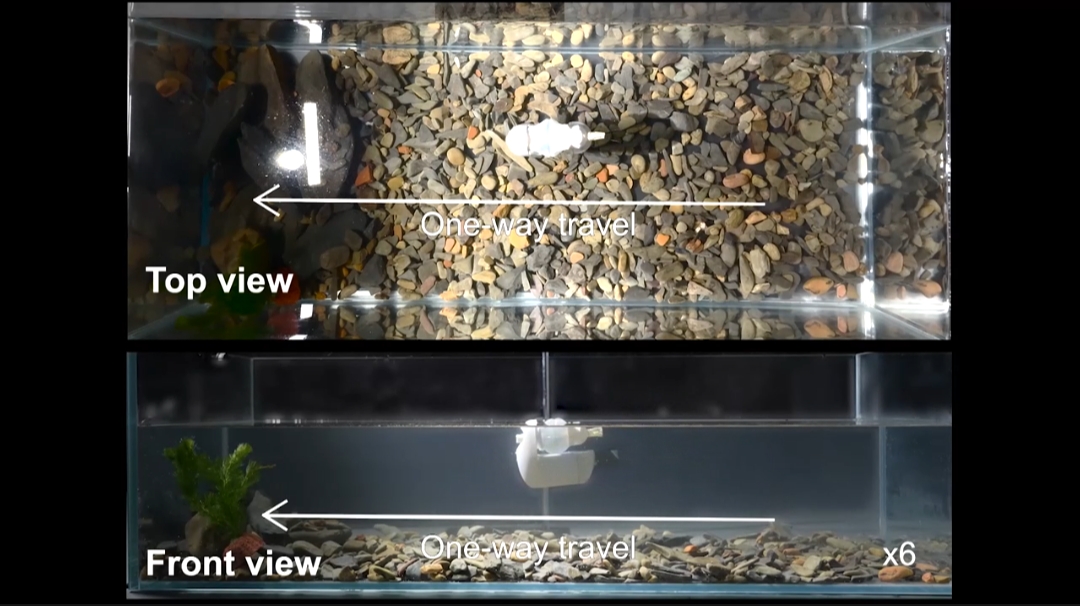
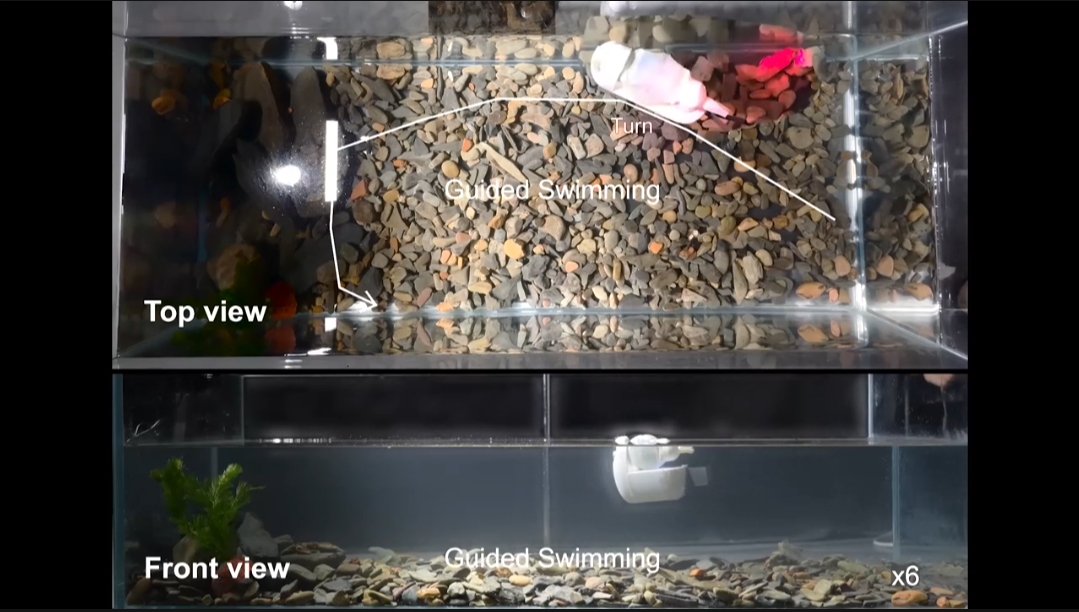
Scalable Jet Swimmer

Cephalopods, such as squid and nautilus, achieve fast swimming by jetting water swiftly from their chambers, offering benefits in swimming speed, energy efficiency, and silent operation. Inspired by these animals, Prof. Ke Liu and his collaborators proposed a scalable soft robotic jet swimmer that utilizes soft chamber buckling to enable rapid water jetting. The design incorporates three main components: the knotted artificial muscle (KAM), an origami-inspired soft chamber, and a custom control module. The KAM generates significant force and stroke with minimal self-weight, but its actuation speed is insufficient for propelling water. To address its limited actuation speed, we design an origami-inspired soft chamber that buckles instantly when the KAM's pulling force reaches a critical threshold, thereby amplifying actuation speed and enabling rapid water jetting. The control module periodically activates the KAM to tighten and release, facilitating effective pulsatile propulsion. Similar to Cephalopods, this design is scalable and robust. We demonstrate effective swimming of two robots with drastically different sizes, achieving a top speed of 0.62 body length per second. We also show that the propulsion is minimally compromised even when the KAM is significantly damaged. To further enable guided locomotion, a shape memory alloy rudder is incorporated for steering via infrared stimulation. This work demonstrates successful pulsatile jet swimming through the integration of smart materials and structures, laying the groundwork for future innovations in underwater soft robotics.
The work was published in Advanced Materials on June 13, 2025.
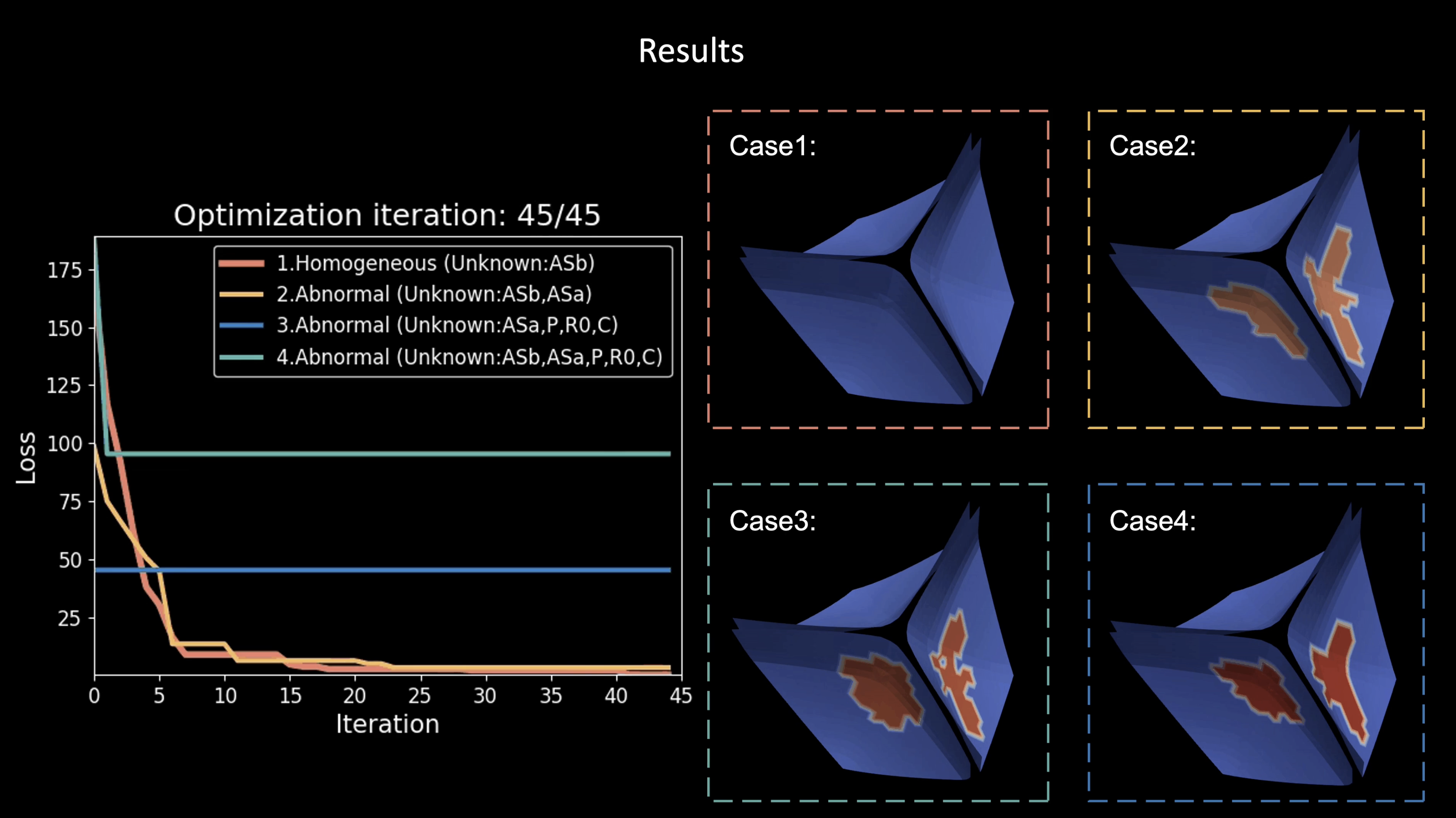
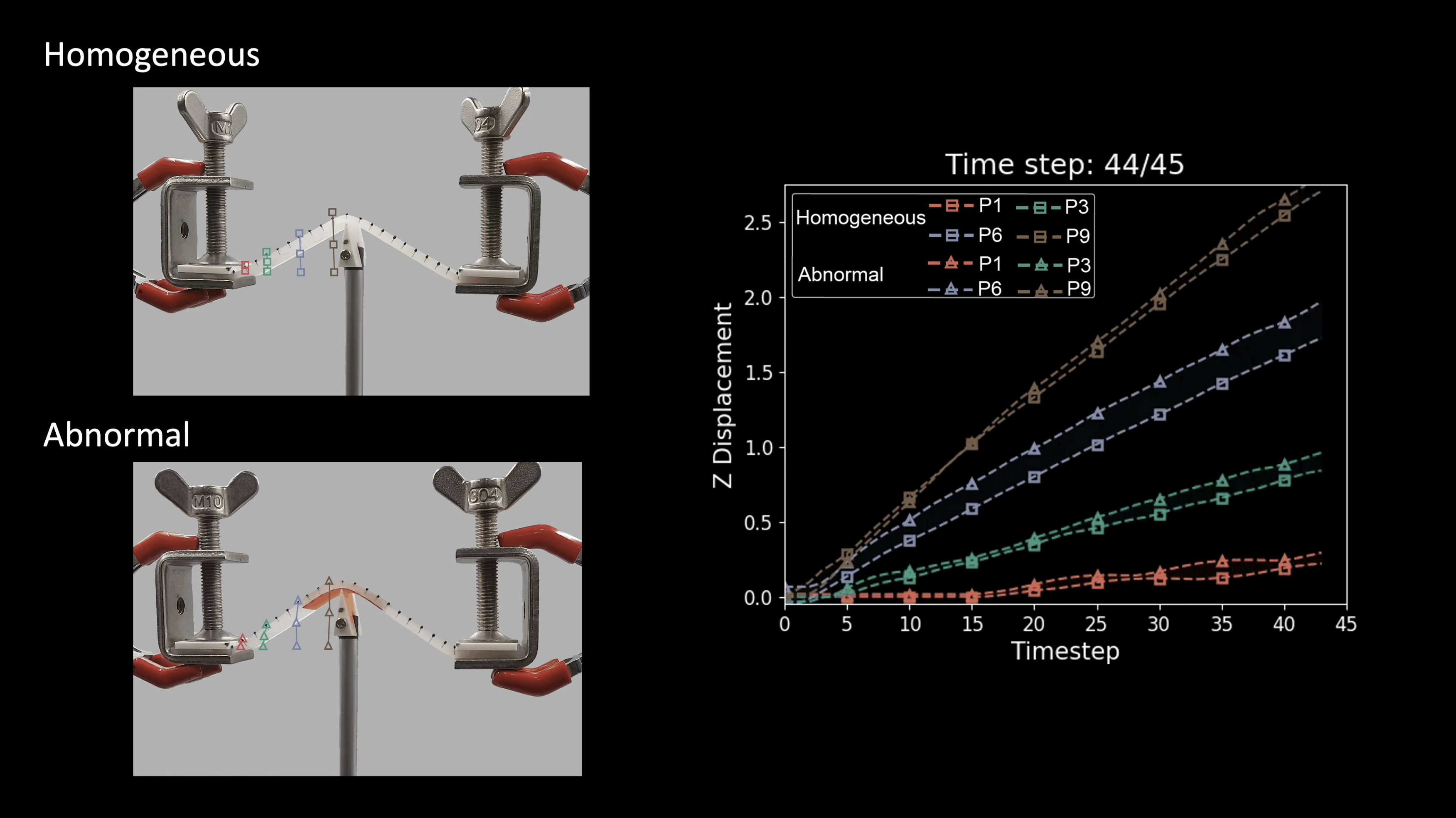
Uncover Hidden Physical Information of Soft Matter by Observing Large Deformation
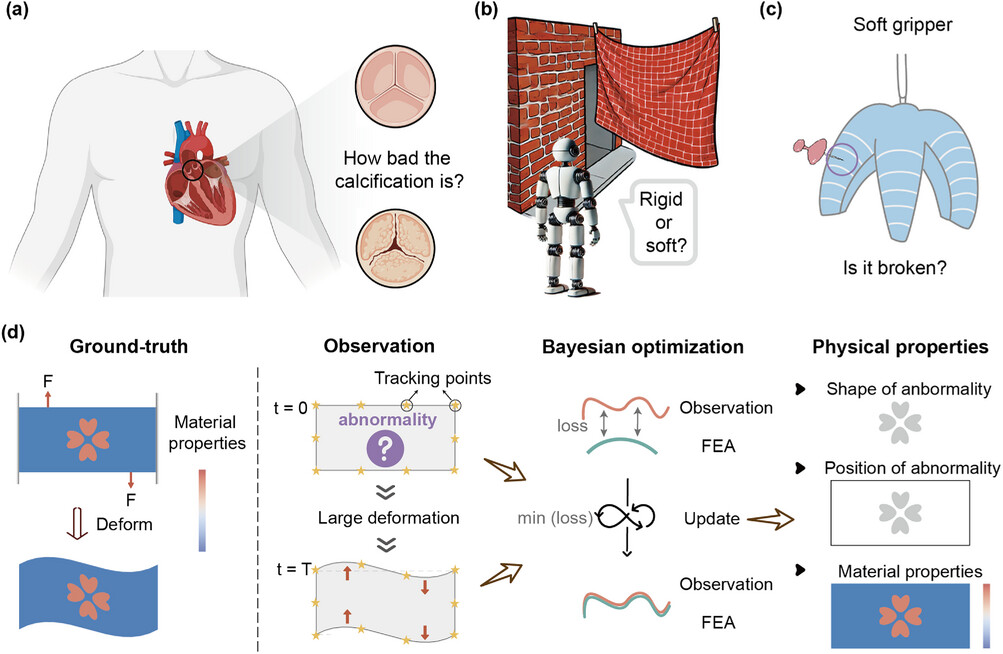
Accurate and non-destructive detection of material abnormalities inside soft matter remains an elusive challenge due to its variable and heterogeneous nature, especially regarding non-visual information. Here, a method is introduced that uncovers the physical information of internal material abnormalities from large deformations observed on the surface of the soft object. It finds the most probable values of imperceptible physical parameters by matching the nonlinear surface deformation between observation and finite element simulation through parallel Bayesian optimization, balancing the trade-off between simulation accuracy and computational efficiency. Numerical and experimental tests, including simulated cases of aortic valve calcification, are conducted to showcase the effectiveness of our method, where we successfully recover hidden physical parameters including material stiffness, abnormality shape, and location.
The work was published in Advanced Science in 2025.
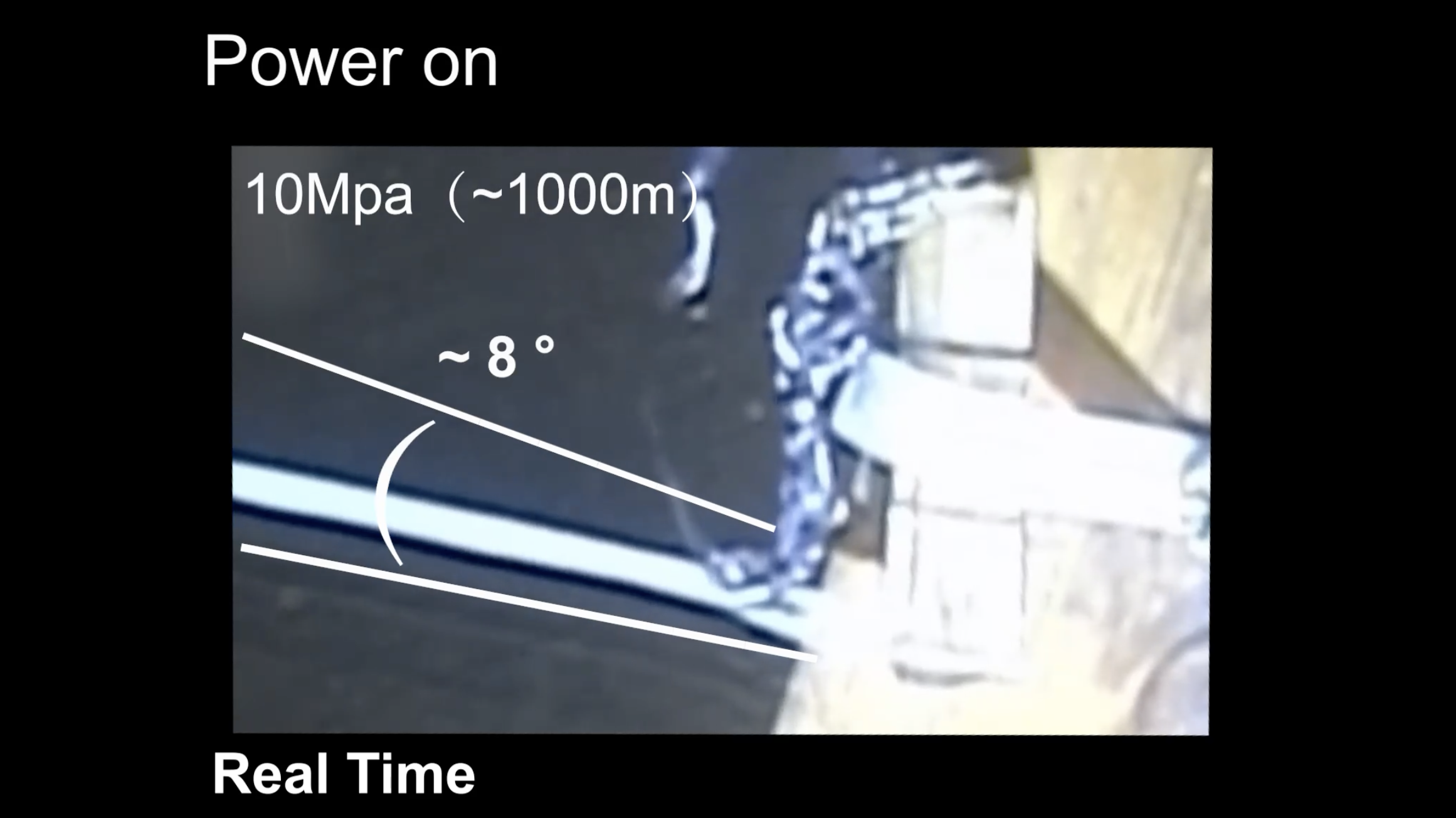
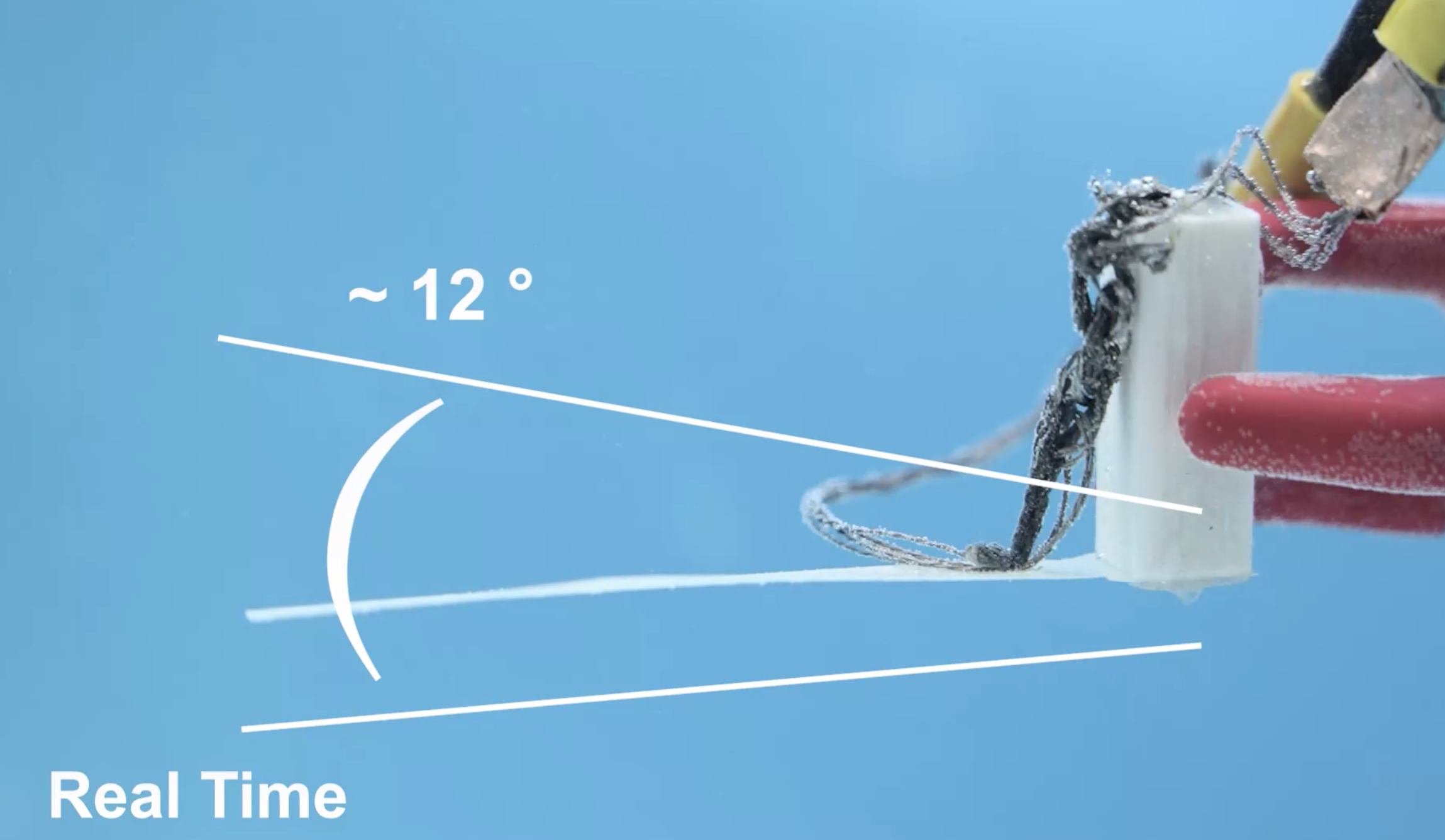
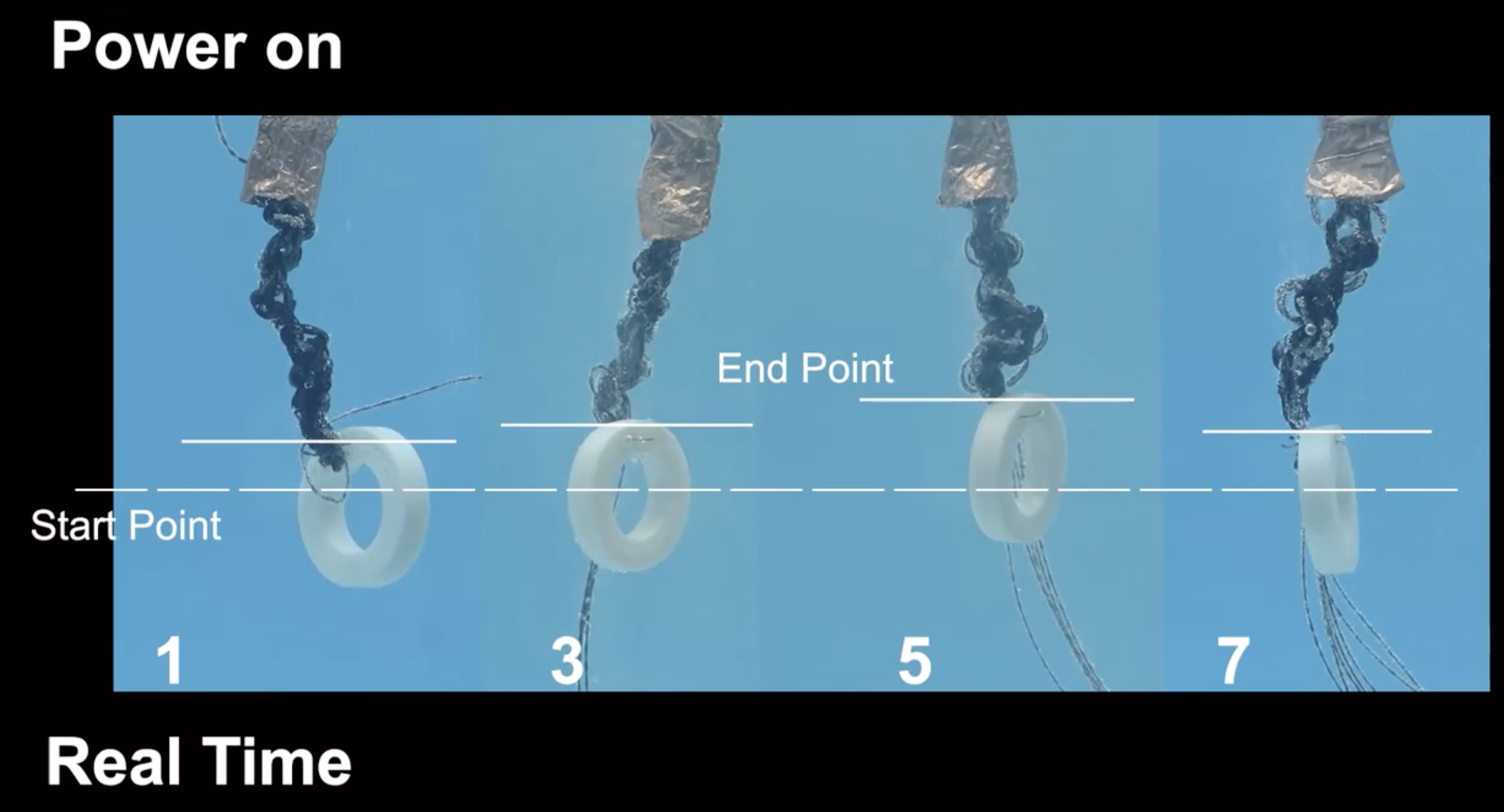
Knotted Artificial Muscles
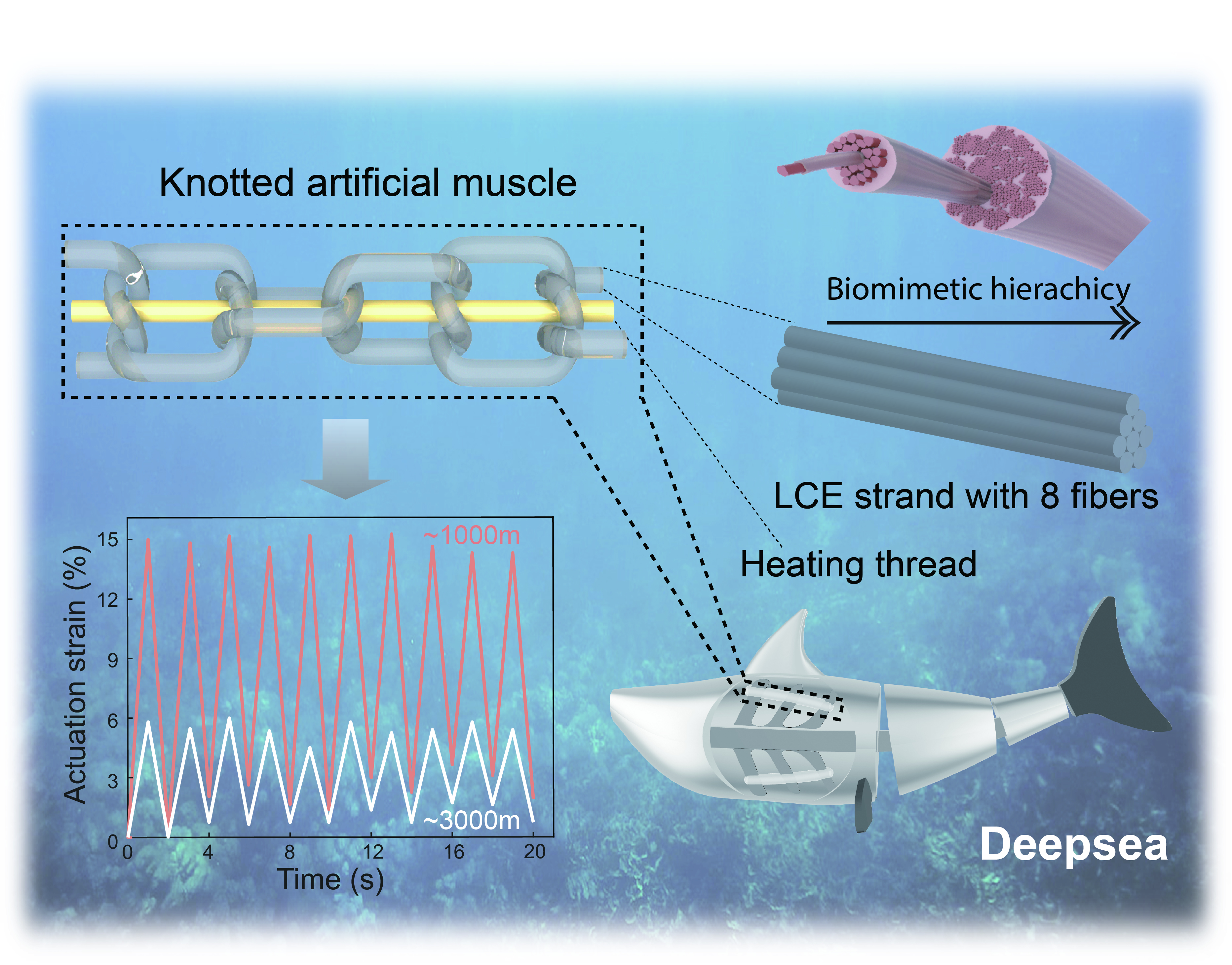
Artificial muscles are yet to match their biological counterparts, due to inferior actuation speed, magnitude, mode, or adaptability. Prof. Ke Liu and his collaborators (Mr. Cong Wang and Prof. Huai Yang) proposed a novel type of artificial muscles, capable of high stroke and fast linear contractions. The artificial muscles consist of knots braided from 3D printed LCE fibers and thin heating threads. The unique hierarchical, braided knot structure offers amplified linear stroke, force rate, and damage-tolerance, as verified by both numerical simulations and experiments. In particular, the square knotted artificial muscle shows reliable cycles of actuation at 1Hz in 3000m depth underwater. Looking ahead, the knotted artificial muscles can empower novel biomedical devices and soft robots to explore various environments, from inside human body to the mysterious deepsea.
The work was published in Advanced Materials on April 20, 2024.
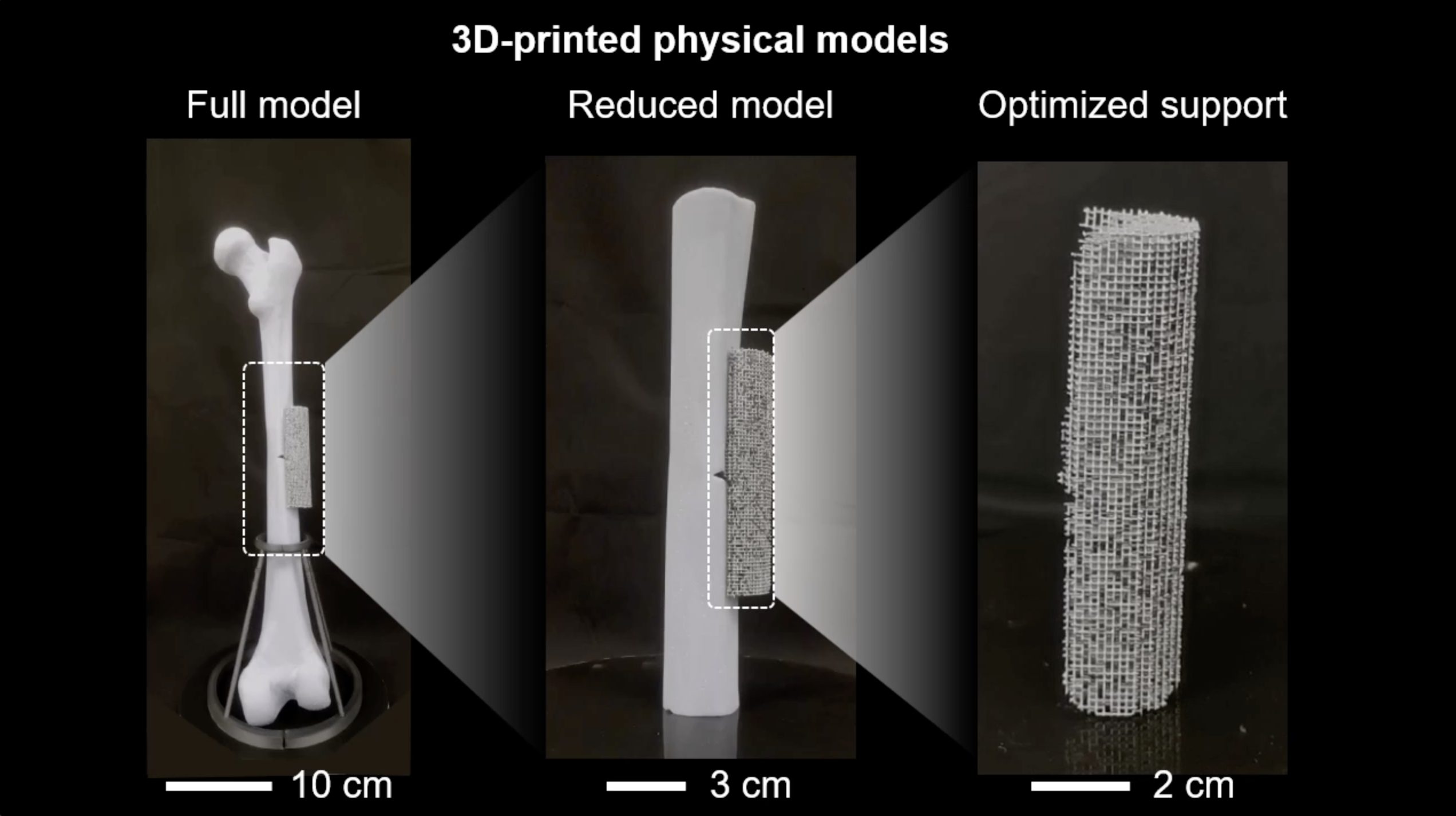
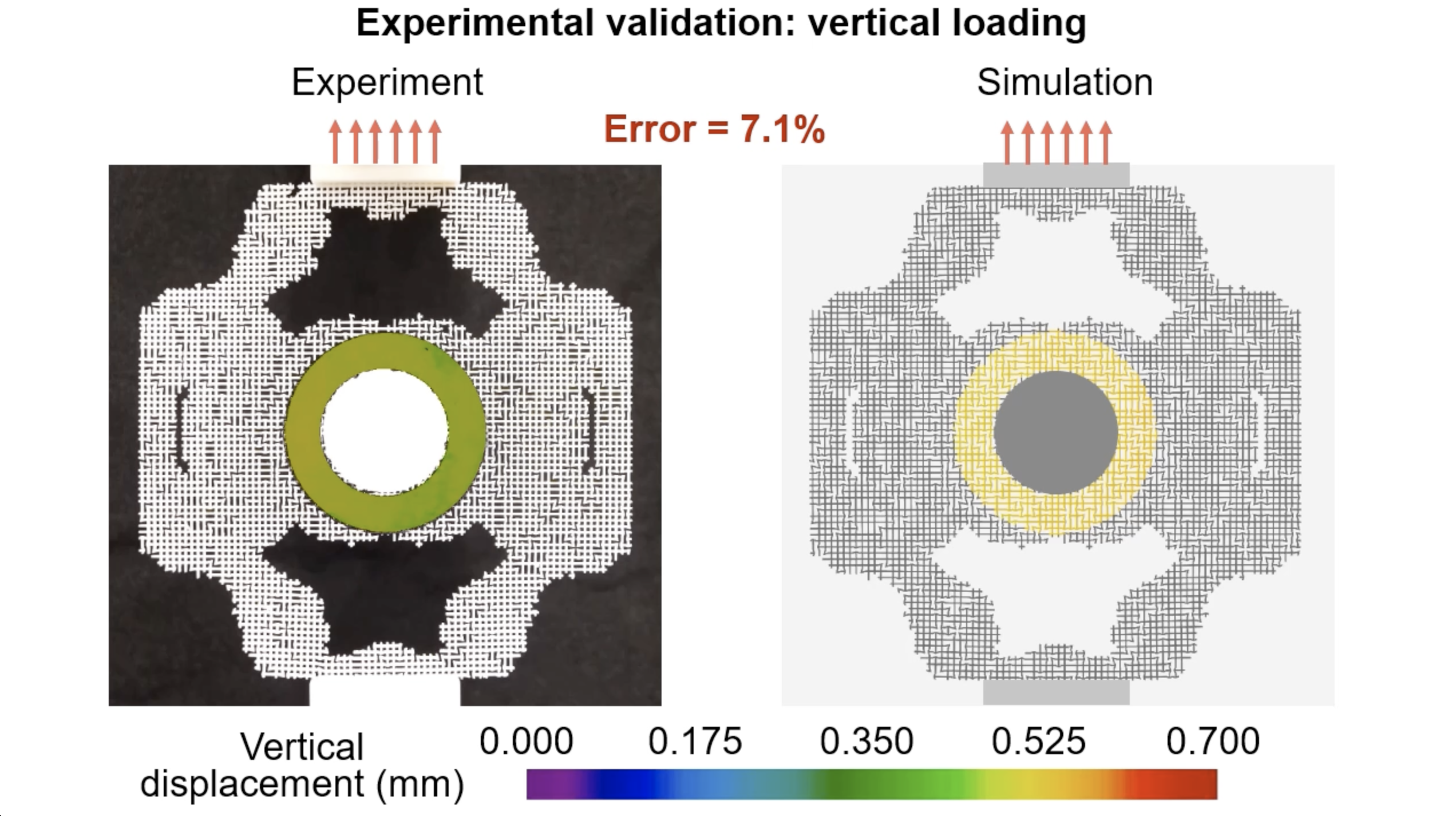
Modulate Stress Distribution with Bio-inspired Irregular Architected Materials
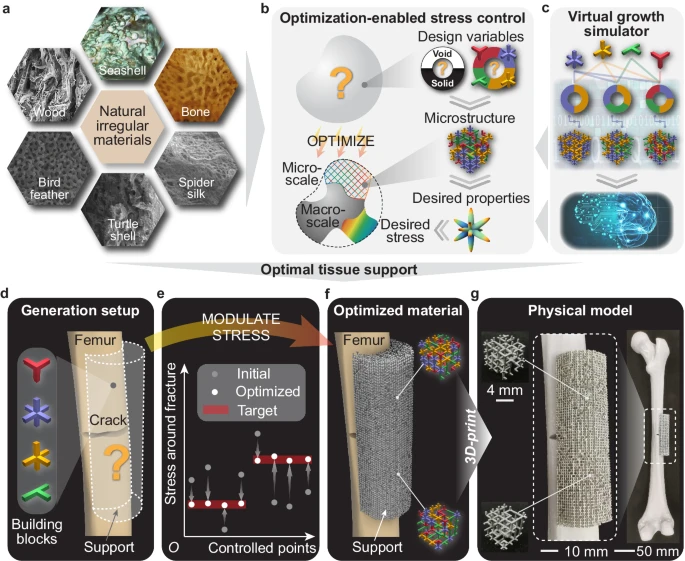
Natural materials typically exhibit irregular and non-periodic architectures, endowing them with compelling functionalities such as body protection, camouflage, and mechanical stress modulation. Among these functionalities, mechanical stress modulation is crucial for homeostasis regulation and tissue remodeling. Here, we uncover the relationship between stress modulation functionality and the irregularity of bio-inspired architected materials by a generative computational framework. This framework optimizes the spatial distribution of a limited set of basic building blocks and uses these blocks to assemble irregular materials with heterogeneous, disordered microstructures. The performance of the generated irregular architected materials is experimentally validated with 3D printed physical samples. We demonstrate the potential application of the stress-programmable architected materials as support in orthopedic femur restoration.
The work was published in Nature Communications in 2024.
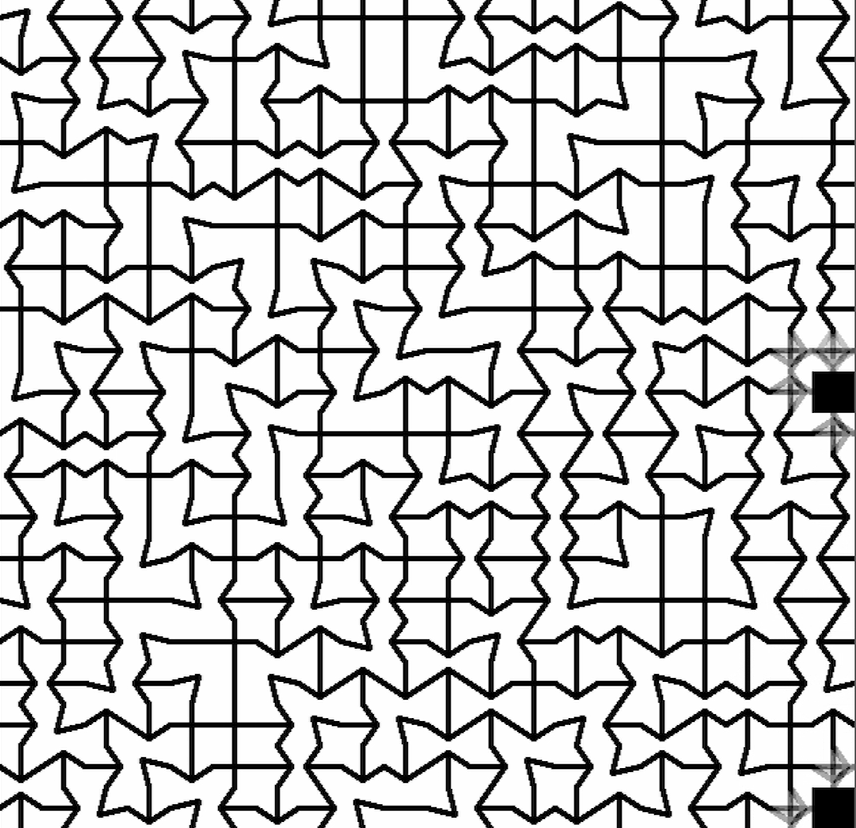
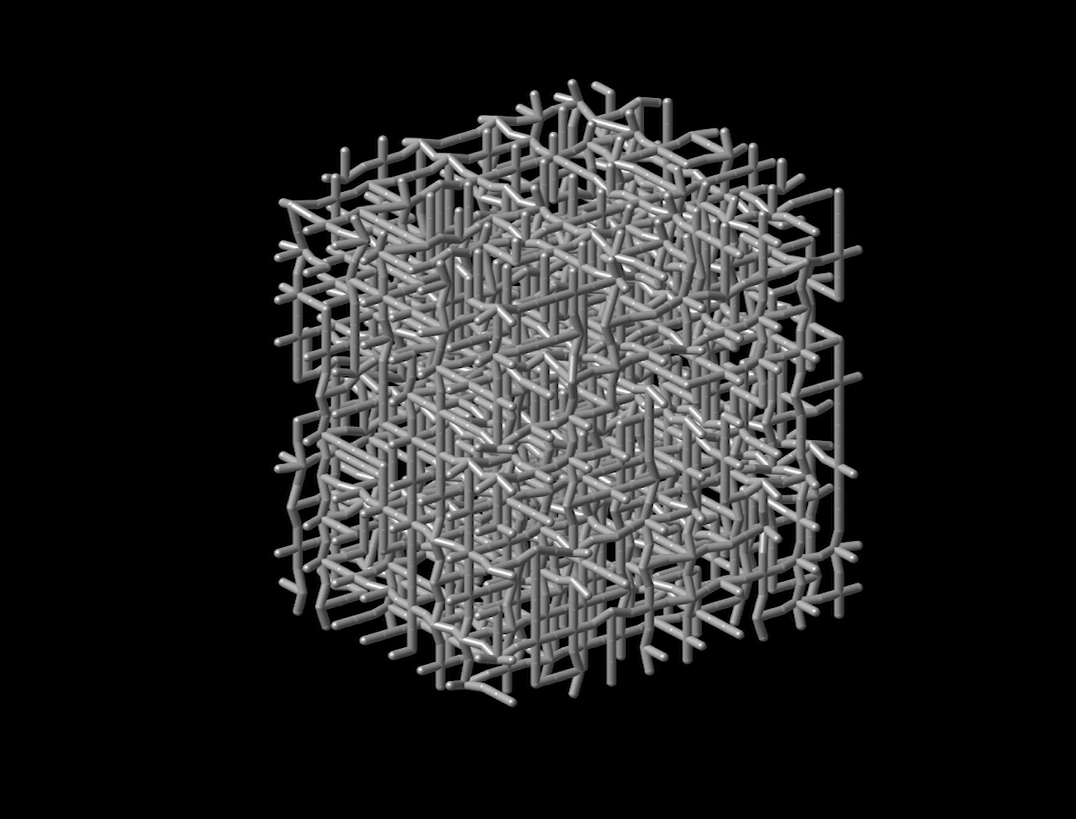
Growth Rules for Irregular Architected Materials with Programmable Properties

Biomaterials display microstructures that are geometrically irregular and functionally efficient. Understanding the role of irregularity in determining material properties offers a new path to engineer materials with superior functionalities, such as imperfection insensitivity, enhanced impact absorption, and stress redirection. We uncover fundamental, probabilistic structure–property relationships using a growth-inspired program that evokes the formation of stochastic architectures in natural systems. This virtual growth program imposes a set of local rules on a limited number of basic elements. It generates materials that exhibit a large variation in functional properties starting from very limited initial resources, which echoes the diversity of biological systems. We identify basic rules to control mechanical properties by independently varying the microstructure’s topology and geometry in a general, graph-based representation of irregular materials.
The work was published in Science on 26 August, 2022.
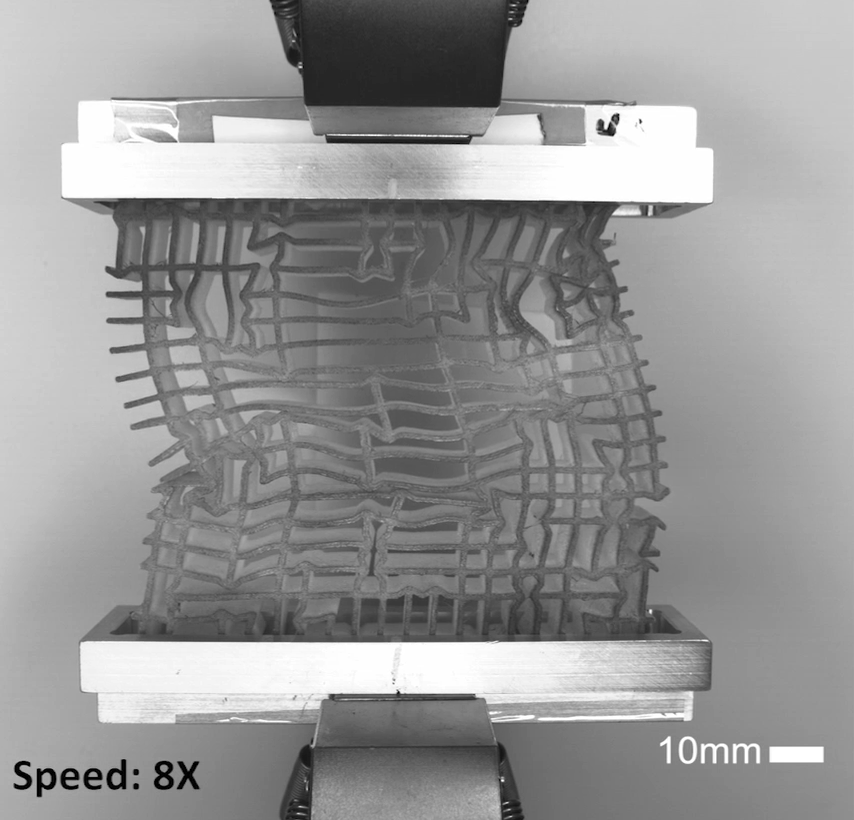
Robotic Surfaces for Shape Morphing and Object Manipulation
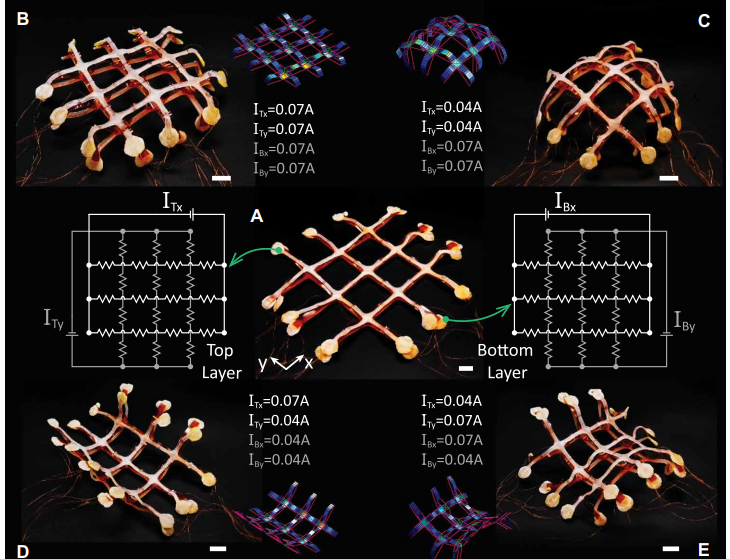
Continuous and controlled shape morphing is essential for soft machines to conform, grasp, and move while interacting safely with their surroundings. Prof. Ke Liu and his collaborators (Mr. F. Hacker and Prof. C. Daraio) developed a soft, robotic surface that allows for large, reprogrammable, and pliable shape morphing into smooth 3D geometries. The robotic surface consists of a layered design composed of two active networks serving as artificial muscles, one passive network serving as a skeleton, and cover scales serving as an artificial skin. The active network consists of a grid of strips made of heat-responsive liquid crystal elastomers (LCEs) containing stretchable heating coils. The magnitude and speed of contraction of the LCEs can be controlled by varying the input electric currents. The 1D contraction of the LCE strips activates in-plane and out-of-plane deformations; these deformations are both necessary to transform a flat surface into arbitrary 3D geometries. The robotic surface provides sufficient mechanical stiffness and stability to manipulate other objects. This approach has potential to address the needs of a range of applications beyond shape changes, such as human-robot interactions and reconfigurable electronics.
The work was published in Science Robotics on June 14, 2017.
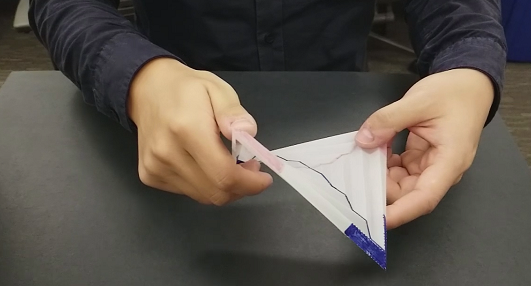
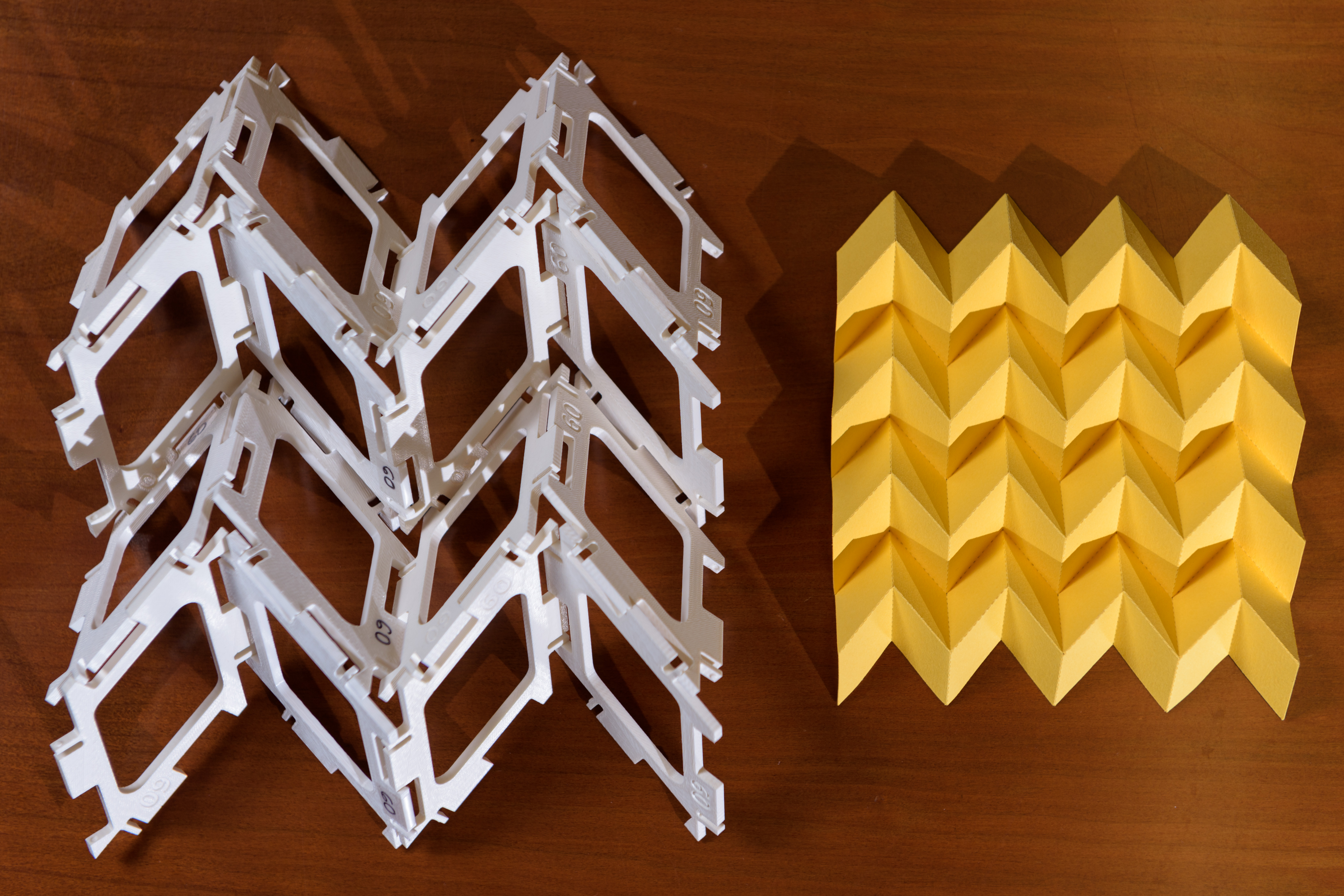
Invariant and Smooth Limit of Discrete Geometry Folded from Bistable Hypar Origami

Professor Ke Liu, Prof. T. Tachi, and Prof. G. H. Paulino, show that an origami, folded from a flat sheet of paper via a discrete number of concentric squares (a hypar), is invariantly a hyperbolic paraboloid in the mathematical limit of the number of concentric squares, and it does not matter whether the concentric squares have uniform width or randomly distributed widths. Further, by connecting geometry and mechanics, they prove that a folded hypar has bistability between two symmetric configurations, which they harness to create multi-stable metasurfaces with programmable non-Euclidean geometries by tessellating the hypars.
The work was published in Nature Communications on September 17, 2019.
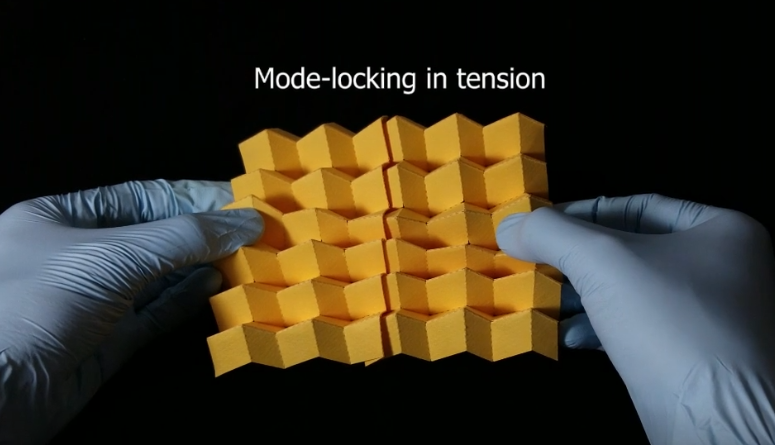
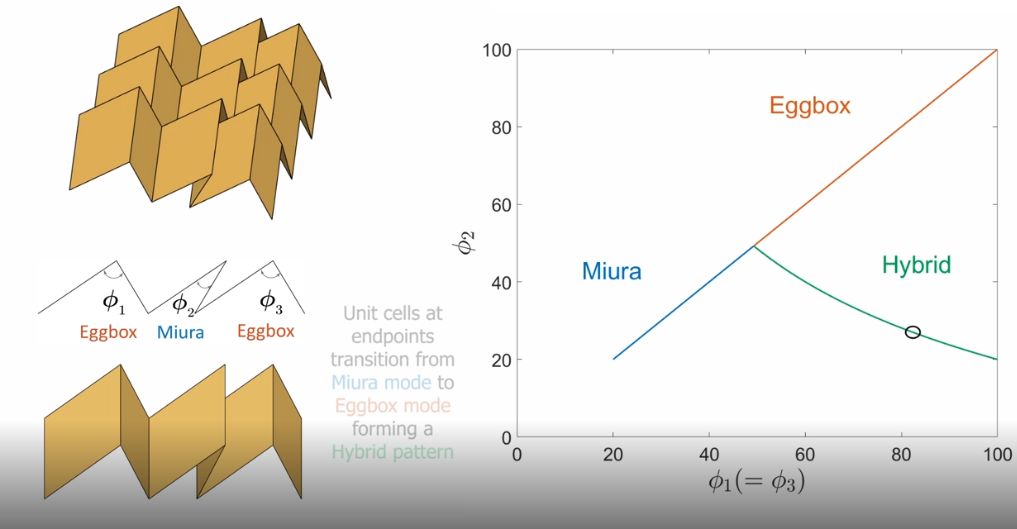
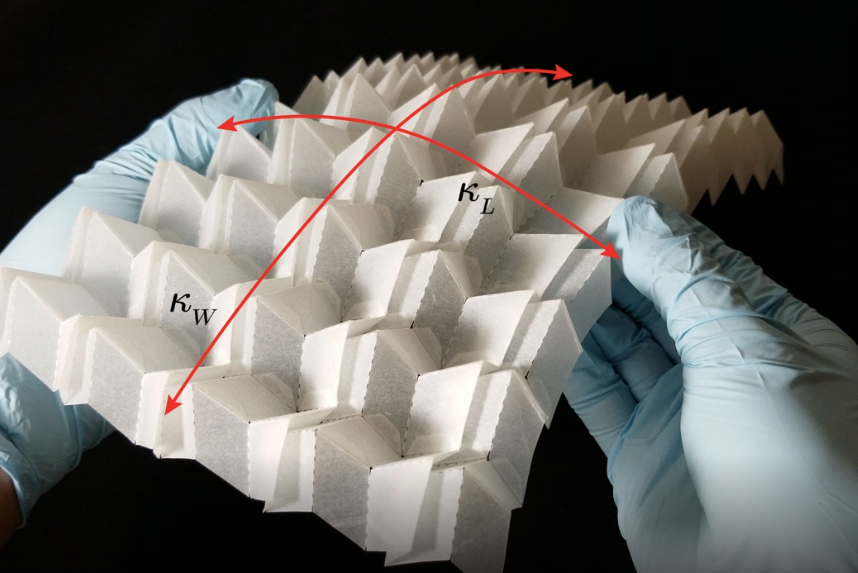
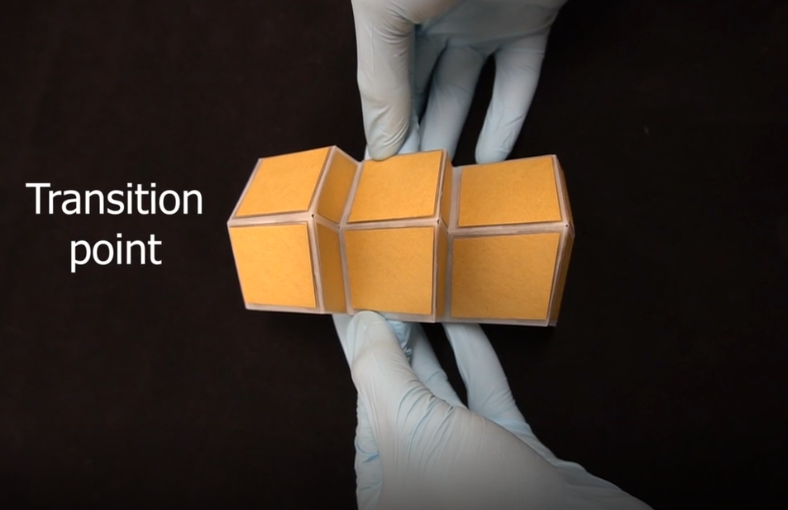
Geometric Mechanics of the Morph Origami
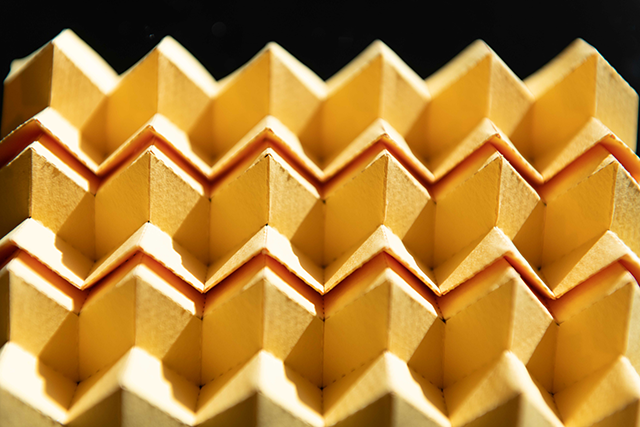
Professor Ke Liu and his collaborators (Prof. P. Pratapa and Prof. G. H. Paulino) proposed a new four-vertex origami unit cell, named Morph, that can morph continuously between a Miura mode and an Eggbox mode. By changing the mountain/valley assignment of one of the creases, the unit cell's Poisson's ratio smoothly transitions over a wide range of negative to positive values. The metamaterial, composed of a tessellation of these unit cells, can be programmed into numerous hybrid configurations that allow for mode-locking and tunable switching of Poisson's ratio.
The work was published in Physical Review Letters on April 19, 2019.
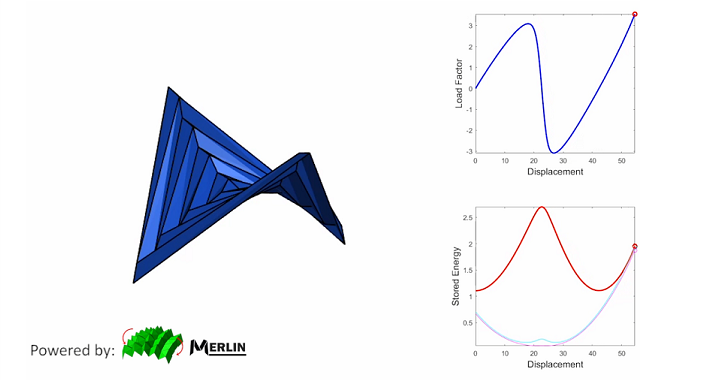
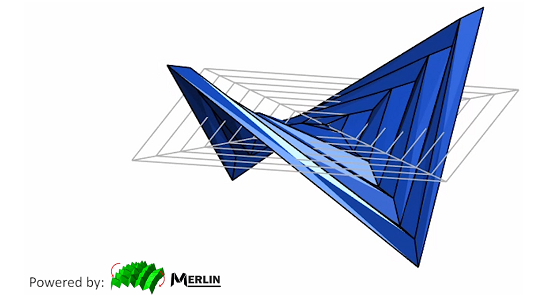
Nonlinear Mechanics of Non-rigid Origami




Although not always apparent, Origami is indeed pervasive in many areas of science, engineering, technology, entertainment, education, fashion, etc. In general, origami structures exhibit complicated behavior, beyond simple folding, which cannot be explained by geometry alone. Thus, there is a need for a simple and effective analysis tool that provides insight into the deformation behavior of origami assemblages. This is just what Prof. Ke Liu have provided with the MERLIN software, which implements nonlinear mechanics theory using a reduced representation of origami to model large global displacements. Now, within seconds, the user can predict the behavior of an origami structure and unfold the underlying physics.
The work was published in the Proceedings of the Royal Society-A on October 11, 2017.